
|
Friday, October 21, 2016 |
||
| Arrival | ||
| 6:00pm | Informal Dinner Get Together – Meet at Sanctuary Restaurant and Wine Bar in the DoubleTree Hotel | |
|
Saturday, October 22, 2016 |
||
| 8:30 – 9:00 | Registration – coffee | |
| 9:00 – 10:00 | Keynote Address | |
Neuromechanics and Hierarchical Systems: Complexity, Coupling and Cockroaches |
||
|
|
||
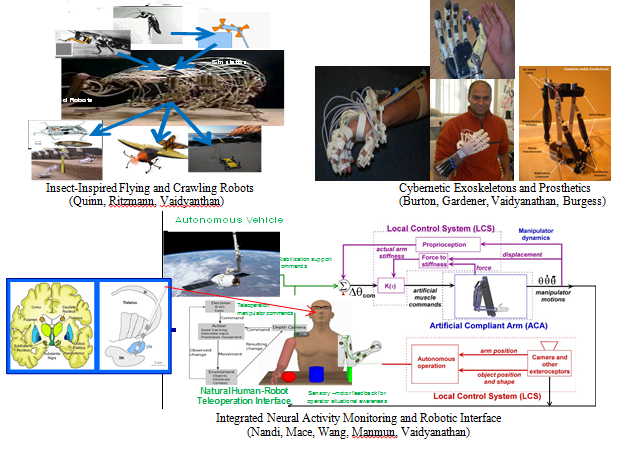
Self-organization in neuromuscular control may be modeled from a hierarchical systems perspective, with mapping of motor commands from sensory signals to a transformation based on the non-linear dynamics of the system. The computational intricacy of the transformation correlates directly to the dynamic coupling in the system; the more coupling, the greater the complexity of the transformation. The core hypothesis is the idea that complex behavior emerges from the interaction of an entity with its environment as a result of sensory-motor activity; interactions among a breadth of subsystems must be tuned and adapted to achieve this objective. In animals, for example, intrinsic properties of the musculoskeletal system augment the neural stabilization of the organism for an array of critical of functions.Modeling this hierarchical coupling for implementation in robotic systems has spurred innovation in medicine, cybernetics, and mobile robots. The talk will explore the role of blended intelligence in the formulation of theoretical and computational frameworks elucidating how dynamics of the morphology of a biological structure play a computational role in the system, and in effect subsume portions of the control architecture. Architectures founded upon biological inspiration will be summarized with specific examples from the speaker’s work, including recent research that has been featured in New Scientist, Flight Global, and The Engineer magazines and on television specials produced by the BBC, Tokyo Broadcasting Systems, and the Discovery Channel. Applications highlighted will review medical and mobile robotic systems including: insect-inspired mobile robots, cybernetic robot exoskeletons, and brain-implant and robot interface systems.
|
||
Ravi Vaidyanathan is a Senior Lecturer in Bio-Mechatronics at Imperial College London, UK. Dr. Vaidyanathan has led more than 20 separate research programs supported in USA, Singapore, and UK, authored over 100 refereed publications and is a named inventor four pending patents. His research has been recognized internationally awards from SAGE Journals, the Institute of Electrical and Electronics Engineers (IEEE), American Institute of Aeronautics and Astronautics (AIAA), and the Robotics Society of Japan (RSJ) including: “Best Paper” at the IEEE International Conference on Intelligent Robots and Systems, “Best Paper” in the Journal of Systems and Control Engineering, and being a finalist for the “New Technology Foundation Research Award on Entertainment Robots and Systems” awarded by the IEEE and the RSJ in recognition of the most innovative research in robotics over the 20 year period of 1987-2007. In 2016 his laboratory was awarded the UK “National Health Service (NHS) Innovation Award” as well as the UK Institute of Engineering Technology (IET) ‘Most Promising Innovation in Robotics’ award for their research in neuroroboitcs. Revolutionary aspects have also been featured by: the BBC, New Scientist, The Engineer, Inc. Magazine, IEEE Institute, Flight Global Magazine, The Times of India, The Discovery Channel, and the Tokyo Broadcasting Company and have been invited for presentation to the US Pentagon and UK Parliament. His laboratory has supported the formation of four spinout companies in biorobotics and mechatronics. He is currently co-chair of the IEEE Robotics and Automation Society Technical Advisory Committee on Biorobotics |
||
| 10:00 – 10:15 | Break | |
| 10:15 – 10:45 |
Session I: Featured Workshop Paper
The Particle Swarm Paradigm is a Particle Swarm
James Kennedy
|
|
| 10:45 – 12:15 | Session II: Applications Practical Multi-Agent Systems(MAS) for Commercial Systems Ryan May Asset Allocation with Swarm/Human Blended Intelligence Lauren Christopher, et. al. Chattersum: an Approach to Breakout Topic Detection from Time Series Social Data Doyle Groves | |
| 12:15 – 2:00 | Lunch on your own | |
| 2:00 – 3:30 | Session III: Online Human Swarming Crowds vs. Swarms a Comparison of Intelligence Louis Rosenberg, David Baltaxe, and Niccolo Pescetelli Demonstration of UNU software Setting Group Priorities – Swarms vs. Votes Louis Rosenberg and David Baltaxe | |
| 3:30 – 3:45 | Break | |
| 3:45 – 4:15 | Session IV: Cultural Algorithms Auctions as Knowledge Distribution Mechanisms in Cultural Algorithms Robert Reynolds | |
| 4:15 | Travel to John Carroll University | |
| 5:00 – 6:00 | Human Swarm Sudoku Event @ John Carroll University | |
| 6:00 – 7:30 | Dinner/Discussion of Blended Intelligence | |
| 7:30 – ? | Open discussions, informal conversations, travel back to hotel | |
|
Sunday, October 23, 2016 |
||
| 9:30 – 10:30 |
|
|
| 10:30 – 10:45 | Break | |
| 10:45 – 12:15 |
Session VI: Multi-agent Systems A Real-Life Robotic Application of the Particle Swarm Optimization Algorithm Sami Khorbotly, et. al. Exploratory Scaling of Human-Swarm Hybrid Systems to Manage Simultaneous Scenarios Marc Kirschenbaum and Daniel Palmer Centralized vs. Decentralized Approach to Solving a Sudoku Puzzle with Human Agents Daniel Palmer and Marc Kirschenbaum |
|


Sponsors


